
来源: Freak 三年一班
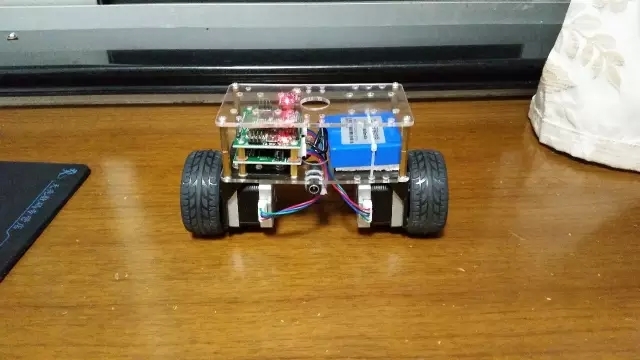
小车的整体组成有如下部分构成:
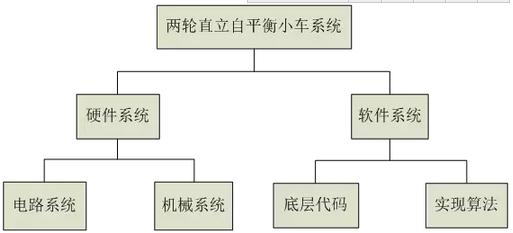
由于做这套系统涉及到的内容比较多,这次作品我将陆陆续续做成一个系列来介绍,先介绍电路原理。
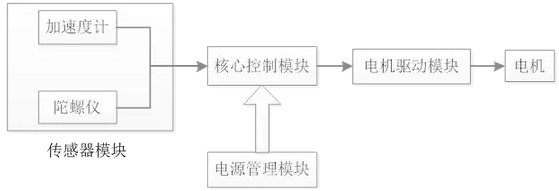
首先我们要知道小车构成的电路框架:
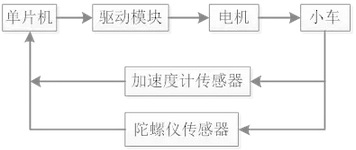
主要分:传感器模块,核心控制模块,电机驱动模块,其中传感器模块主要由加速度计和陀螺仪两个部件组成。
由于图片篇幅关系,我将整幅电路图分别截图:
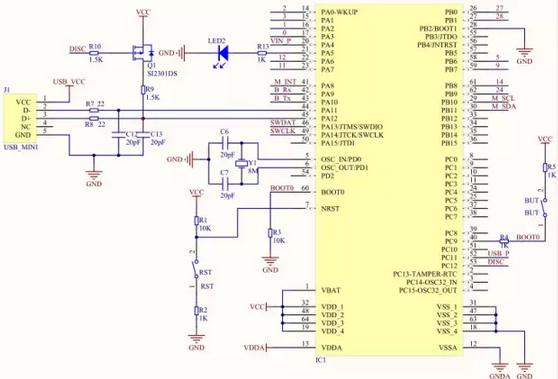
这块是STM32的最小系统板,至于细节我就不多说了,你买来元件,只要按照上图焊接元件就行。
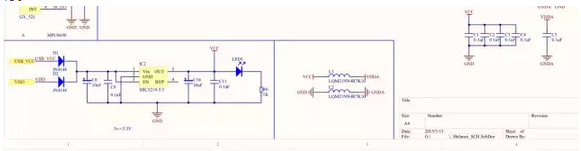
这是稳压部分,用的是MIC5219稳压芯片,你可以直接买降压稳压模块替代电路。
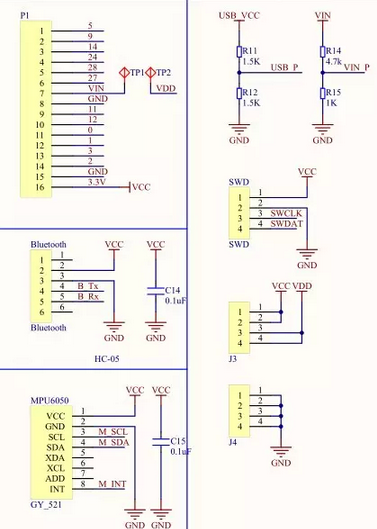
这边是传感器的插口,GY_521是传感器插口用来插加速度+陀螺仪传感器模块,这里采用的是MPU6050,价格在20—70之间。bluetooth自然是蓝牙模块。P1排口是用来连接驱动模块和主板的,驱动模块可以直接选购L298N电机驱动模块。
整个工作机理就是:
传感器获取姿态,通过单片机进行计算和判断姿态,然后做出对当前姿态的反馈,将指令下达给电机,但是单片机的电压又不够直接驱动电机,所以需要驱动模块来向电机转达指令,电机接收到指令后进行相应的运转,对当前姿态进行了调整,如此一个循环,使得车体保持一个平衡,这里使用了自动控制里一个经典的算法,PID控制算法。


好了这些功能模块就构建了整个小车的控制系统。